In der Physik unterscheiden wir zwischen elastischen und inelastischen Stößen (vgl. wiki Stoß).
Die Effekte der elastischen Stöße kann man schön mit Newton-Pendel (die n-Metallkugeln an dünnen Leinen aufgehängt) oder Billardkugeln studieren. Die kinetische Bewegungsenergie bleibt dabei im Idealfall erhalten. Bei Un- bzw. Inelastische Stößen geht kinetische Bewegungsenergie verloren und geht in Deformation und Reibungsenergie über (z.B. ein Mehlteigballen gegen das Backblech werfen). Reale Stöße sind häufig eine Mischung aus beiden Formen.
Was bedeutet das fürs Laufen?
Um sich die wirkenden Kräfte klar zu machen empfehle ich folgendes Experiment (nur leichte und geübte Läufer auf eigenes Risiko).
Man stellt sich auf einen Bordstein (hier 16,5cm hoch),
hält die Füße zusammen,
springt mit beiden Füßen gleichzeitig mit gestrecktem Knie d.h. Hüfte, Knie und Knöchel auf einer Geraden ab
und versucht mit beiden Füßen gleichzeitig auf den Fersen zu landen.
Schon in der Absprungposition wird einem dabei etwas „mulmig“. Soll ich wirklich auf den Fersen landen? Das ganze kommt einem widernatürlich vor. Man ist von Natur aus geneigt, auf dem Fußballen zu landen. Aber das wollen wir jetzt mal nicht. Schlägt man auf dem Boden auf, spürt man deutlich wie der Impuls durch alle Gelenke bis in Rücken und Kopf wirkt.
Wenn man sich die Fotos unten anschaut sieht man, dass sich die Schnürsenkel nach dem Aufprall nicht mehr nach oben bewegen. Das und die persönliche Wahrnehmung deuten darauf hin, dass es ein weitgehend unelastischer Stoß ist.
Die potentielle Lageenergie
ist zunächst in kinetische Energie
– hier ca. 2m/s = 7,2 km/h – und dann in Reibungsenergie umgewandelt worden. Man beachte, dass hier die Geschwindigkeit mit dem Quadrat eingeht.
Die Reibungsenergie ist nicht vollständig im „Stoßdämpfer“ Laufschuh geblieben sondern hat auch auf unsere Knochen und Gelenke gewirkt und da eventuell zur Beschädigung geführt. Einerseits brauchen wir diese Impulse als Stimulanz für den Knochenaufbau (Osteoporose Prävention) andererseits kann es sein, dass der Schaden zu groß ist und nicht mehr regeneriert werden kann.Je größer Fallhöhe und Gewicht des Läufers, desto stärker die Belastung durch den Aufprall.
Man kann das Experiment nun abwandeln, in dem man z.B.
Aus welcher Höhe fällst Du beim Laufen Richtung Erde?
Mit welchem Fußteil landest Du?
Einfach mal experimentieren, per Handy Filmen, Screenshot machen und Beitrag oder Kommentar posten.
Laufen wird zutreffend auch mit kontrolliertem Fallen beschrieben. Wir Fallen auf unsere Füße. In der Tat besteht eine Fallübung darin, sich aus dem Stand langsam nach vorne fallen zu lassen und erst kurz vor dem Sturz in einen Schritt überzugehen. Das sollte man mal ausprobieren und dabei darauf achten, auf welches Fußteil man abschließend fällt.
Obwohl die Fußballen-Landung die natürlichere Variante ist, beobachtet man in der Laufpraxis häufig die Fersenlandung.
Woher kommt nun der Fersenlauf?
Nach meiner Erfahrung und physikalischen Einschätzung liegt ein wesentlicher Bestimmungsgrund im Laufschema. Der Läufer versucht beim Fersenlauf weit vor dem Körperschwerpunkt mit dem Fuß aufzusetzen. Wenn man diese Weite nicht über den Kniehub oder den kräftigen Abdruck mit ausgeprägter Flugphase realisiert, setzt man fast zwangsläufig mit der Ferse auf.Das Bein ist dabei gestreckt. Wenn man hingegen „vorne kurzen Schritt, hinten langen Schritt“ (VokuHila) läuft vermeidet man die Fersenlandung. Der Fersenlauf ist häufig das kontradiktorische Gegenteil zu VokuHila.
Ein weiterer Bestimmungsgrund liegt im Schuhwerk. Hohe Absätze – hier reicht schon eine Sprengung von >10mm – fördern die Fersenlandung. Jeder der mal den ganzen Tag in flachen Schuhen mit 0.0mm Sprengung unterwegs war wird dies bestätigen können.
„Last but not Least“ kann man Beobachten, dass Fersenläufer häufig eine geringe Schrittfrequenz haben. Wer den Fuß weit vor der Körperschwerpunkt aufsetzt, muss in einem langen Weg den Körperschwerpunkt zum Fuß, über den Fuß bis leicht davor bringen. Dies kostet Zeit und führt häufig zu einer langsamen Schrittfrequenz. Da der Fuß dann auch eine lange Zeit auf dem Boden steht,ist häufig auch die Bodenkontakzeit lang.
Auch das kann man gerne selber empirisch überprüfen.
Der Fersenlauf führt aufgrund des gestreckten Beins häufig zu Problemen. Der Impuls beim Aufschlag wirkt in alle Gelenke bis zum Kopf des Läufers. Je schwerer der Läufer, je ungedämpfter das Schuhwerk und je länger der Lauf desto massiver sind die Probleme die häufig in den Gelenken des Beins (Knöchel, Knie, Hüfte) auftreten.
Dieser Zusammenhang führt dann zu einem circulus vitiosus. Der Läufer setzt weit vor dem Körperschwerpunkt auf, kassiert dafür den kräftigen Impuls in den Gelenken und ruft (oder der Arzt empfiehlt) nach mehr Dämpfung im Laufschuh. Dies hat eine höhere Schuhsprengung zur Folge, die wiederum den Fersenlauf weiter begünstigt.
Man kann sich leicht klar machen, wer die ökonomischen Gewinner dieses Teufelskreis sind.
Verlierer bleibt der Läufer, der mit einem VokuHila Laufstil wahrscheinlich besser beraten wäre, vgl. das Video unten.
Anmerkung 5.8.2019: Ich bekomme auf diesen Beitrag jede Menge Spam Kommentare und habe deshalb die Kommentarfunktion deaktiviert.
Berge hoch zu laufen ist eine besondere Anforderung an jeden Läufer. Wir haben hier in der rheinischen Tiefebene natürlich keine großen Höhenunterschiede aber im Bergischen Land gibt es schon einige Anstiege mit 20%, unter anderem an der Wupper zwischen Solingen und Leichlingen der asphaltierte Anstieg „Fähr-Rödel“.
Nach einem Lauf mit Laufuhr fragt man sich dann unweigerlich, wie viele Höhenmeter (HM) man geschafft hat. Das ist die Summe aller positiven Höhenänderungen
und somit mit der Höhenmessung Ht zum Zeitpunkt t verbunden.
Höhenmessung
An der Definitionsgleichung zu den Höhenmetern erkennt man, dass ein Versatz der Höhe um einen konstanten Betrag keinen Einfluss auf die Höhenmeter hat. Anders sieht es aus, wenn die Höhenmessung um unterschiedliche Beträge versetzt sind d.h. es liegen Messfehler vor . Hier wirkt sich das max(…) in der Definition zu den HM besonders negativ aus, da sich Über- und Unterschätzungen der wahren Höhendifferenz kaum noch kompensieren können. Deshalb kommt der genauen Höhenmessung eine zentrale Rolle zu. Zur Ermittlung der Höhenmeter gibt es derzeit im wesentlichen 3 Methoden:
Die Laufuhr verfügt über ein Barometer und ermittelt über Luftdruckunterschiede (Höhenmessung) die Höhe mit den in der Quelle genanntem Probleme. Häufig kommt es vor, dass man zu Laufbeginn vergessen hat das Gerät zu kalibrieren, so dass die Höhen um einen Betrag verschoben sind. Man kann dann, sofern man eine Höhe kennt, die abgeleitete Höhendifferenz von allen anderen Höhen abziehen. Ein anderes Problem sind Änderungen im Luftdruck (schönes Wetter -> Hochdruck) die die Messung beeinträchtigen kann.
Die Laufuhr hat kein Barometer und ermittelt die Höhe über das GPS-Signal. Diese Methode ist relativ ungeeignet für die Berechnung des Aufstiegs, da sich hier die GPS-Fehler erheblich akkumulieren und wird in der Praxis kaum genutzt.
Die Höhenmeter werden nachträglich bestimmt, in dem man aus einer topografischen Datensammlung (z.B. SRTM) mit Höhenangaben zu gegebenen Längen und Breitengrad der Laufuhraufzeichnung die Höhe – durch Interpolation zwischen den Grid-Punkten – bestimmt und darüber die Summe der positiven Anstiege bildet. Ein Problem sind hier Unterführungen und Tunnel, das andere wesentliche Problem sind Ungenauigkeiten in der geographischen Position.
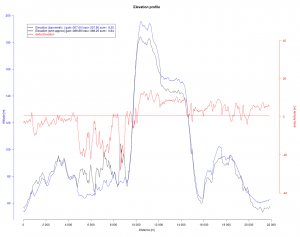
Die Ergebnisse zu Methoden 1 und 3 zum Lauf „Fähr-Rödel“ sind in folgenden Grafik gegenübergestellt.
Die barometrische Höhenmessung weist hier den höchsten Punkt aus, aber in Summe nur 307.88 HM. Die SRTM Interpolationsmethode kommt hingegen auf 388.88 HM obwohl hier kein einziger Tunnel durchlaufen wurde und die gps-Aufzeichnung unter günstigen Bedingungen (freier Himmel, Winter d.h. Laubbäume blattfrei, vgl. GPS Genauigkeit) erfolgte. Damit liegt die SRTM Methode 25% über der barometrischen Methode. Schaut man sich die Stellen an, an denen diese Höhenmeter „geschöpft“ werden, so stechen km 5-10 heraus. Das ist an den Wuppersteilhängen gelegen, und somit besonders empfindlich für aus Geopositionen abgeleitete Höhen. Es ist zu vermuten, dass durch die SRTM Methode nicht nur hier sondern generell bei Schluchten und Tälern enorme Fehler entstehen.
Betrachtet man den Graph der barometrischen Höhenmessung und die Karte zum Lauf, fällt auf, das Anfangs- und Endpunkt – obwohl fast gleiche geographische Position – nicht in der Höhe übereinstimmen und somit in Summe ein Fehler von 9.2 m resultiert. Das kann z.B. auf Luftdruckänderungen während des Laufs beruhen (z.B. Aufzug eines Hochdruckgebiets). Die SRTM Methode hat dem gegenüber nur einen Fehler von 0.64 m, ist hier also besser. Ein ähnliches Abwägungsproblem gibt es in der Statistik und wird mit Bias variance tradeoff bezeichnet. Auch hier nimmt man gerne eine kleine Verzerrung zugunsten einer niedrigeren Varianz (in der Höhe) in kauf.
Die Höhenmeter werden also durch die SRTM-Methode nur sehr ungenau ermittelt und sind auch für Vergleiche unterschiedlicher Strecken kaum geeignet. Das machen Läufer aber sehr gerne, sei es in der Vorbereitung eines Wettkampfs oder in der Bestimmung der Leistungsfähigkeit. Hier kommt noch ein weiteres Problem dazu: Wie vergleiche ich Strecken mit unterschiedlichem Höhenprofil?
Längenmessung
Die Längenmessung sollte eigentlich selbstverständlich sein, stößt aber in der Praxis bei GPS-Laufuhren auf Probleme.
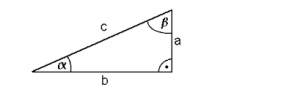
Wenn man einen Berg mit Steigungswinkel α hinauf läuft sollte die Länge der Strecke „c“ (Hypothenuse) in der vorausgegangenen Abbildung als Weglänge angesetzt werden. Rechenbeispiel:
Man läuft 100 m einen Berg mit 10% Steigung hoch. Dann hat man 9.95 m an Höhe gewonnen.
Häufig wird aber für die Weglänge die Strecke b gewählt die sich ausschließlich über die Längen- und Breitengrade der GPS-Punkte berechnen lässt. Dies ist besonders dann ratsam, wenn die Höhendifferenz (Strecke „a“) nur sehr unsicher bestimmt werden kann, z.B. über das GPS Signal und nicht barometrisch. Wie die Hersteller (Garmin, Polar, TomTom, etc.) das derzeit machen ist dem Autor im Detail nicht bekannt und eventuell auch abhängig von der Art der Höhenmessung des Geräts.
Die Längenmessung könnte auch über Geschwindigkeit v und Zeit t mit für ein Segment i erfolgen. Da die Zeit gut – ohne Fehler – gemessen werden kann, hängt nun der Fehler von der Geschwindigkeitsungenauigkeit ab. Da die Geschwindigkeit i.d.R bei einer GPS Laufuhr mit einem Glättungsverfahren z.B. Kalman Filter berechnet wird – in dem die Systemvergangenheit enthalten ist – kommt man so regelmäßig zu anderen Längen gegenüber der topografischen Bestimmung. Hier stellt sich die Frage, wie ein Laufuhr die durchschnittliche Geschwindigkeit in Echtzeit berechnet. Dies ist für Läufer wichtig, da man sich gerne eine Pace für den Wettkampf vorgibt (virtual runner), und davon ausgeht, dass man sein Ziel erreicht hat, wenn man vor dem virtual runner die Ziellinie überschreitet.
Damit gibt es also in der Steigungsmessung = Höhe/Länge erhebliche Fehlerquellen und die Werte sind wahrscheinlich nur approximativ verwendbar. Man kann hier auch nicht einfach über mehrere Abschnitte den Mittelwert bilden (der weniger streut), da sich dann in den aggregierten Abschnitten die Höhenmeter evtl. gegenseitig neutralisieren, wenn auf Steigungen Gefälle folgt. Man kann deshalb vermuten, dass mit steigender Häufigkeit/Dichte der Höhenmessung die ausgewiesene Summe der zurückgelegten Höhenmeter steigt.
Flachstrecken-Äquivalent
Das Flachstrecken-Äquivalent (FSÄ) ist sozusagen der Nullpunkt für den Vergleich von Läufen auf unterschiedlichem Höhenprofilen. Man rechnet die zu vergleichenden Läufe auf das FSÄ um und kann darüber die Läufe vergleichen (ordinal Eigenschaft). Das FSÄ gibt zu einem Lauf eine Lauflänge in der Ebene an, die von der Belastung her gleichwertig ist. Im Idealfall gilt dann, dass die Laufzeit für x km im profilierten Gelände gleich der Laufzeit von FSÄ(x) km in der Ebene ist (kardinal Eigenschaft).
Hierzu gibt es einige Standardformeln, vgl. z.B. Naismith’s rule, die aber nicht ohne Kritik geblieben sind.
Kernpunkt des FSÄ ist die Belastung:
Bei Bergläufen wird die Muskulatur des Läufers häufig anders belastet als in der Ebene, insbesondere die Waden.
Bergläufe erfordern i.d.R auch eine andere Ausrüstung (Schuhe, Rucksack) und sorgen so für zusätzliche Belastungen.
Bergläufe finden häufig auf „schlechtem“ Untergründen statt (z.B. Geröll) die das Vorankommen beeinträchtigen und die Gelenke mehr belasten.
Bei größerer Höhe wird die Luft merklich dünner, die Sauerstoffaufnahme sinkt und das erschwert den Lauf weiterhin.
Jeder von uns weiß aus eigener Erfahrung – und nicht nur aus der Physik -, dass die Überwindung von Höhenmeter zusätzliche Kraft erfordert – und sei es nur eine Brücke mit kleinem Anstieg – und das vorankommen bei gleichem Einsatz langsamer ist.
Für das FSÄ wird i.d.R nur der letzte Punkt berücksichtigt, da die anderen derzeit quantitativ schlecht zugänglich sind bzw. nicht gemessen werden. Sie schlagen sich aber sehr wahrscheinlich in den messbaren Größen wie Herzfrequenz, Kadenz, Schrittweite, Standzeit und Vertikalhub nieder, wobei der quantitative Zusammenhang von Belastungsursache 1.-4. und Messergebnis hier nicht bekannt ist.
Der wichtige Zusammenhang zwischen Steigung und Laufarbeit ist in der folgenden Grafik dargestellt:
Quelle: McMahon (Muscles, Reflexes, and Locomotion. Princeton, NJ: Princeton University Press, 1984) zitiert nach „Dr. Lälles“
Die wesentlichen Linien sind hier die fürs Laufen und Gehen. Demnach steigt die erforderliche Arbeit mit der Steigung, sofern man nicht mehr als 10% Gefälle hat. Radfahrer sagen dazu gerne, dass man die gefahrene Höhe „fair“ zurück bekommt, sofern das Gefälle nicht zu groß ist. Dann nämlich verlässt man das Energieminimum und kann den Höhenverlust nicht optimal in Geschwindigkeit umsetzen.
Die Grafik zum Energieverbrauch mit den Linien für Laufen und Gehen kann man auch als Höhenlinien einer Funktion v=(Energy, gradient) auffassen. Wenn man den Berg schneller hinauf läuft, würde man eine weitere Linie oberhalb der „Running“ Linie erhalten. Wenn man langsamer hinauf läuft (läuft!), würde man eine Linie unterhalb der „Running“ Linie erhalten die evtl. die „Walking“ Linie schneidet, wenn das Tempo zu niedrig wird und ein Gangartwechsel effizienter ist (vgl. Beitrag zur Laufleistung in Watt). Das scheint bei längeren Läufen im profilierten Gelände z.B. Röntgenlauf oder Biel für die meisten von und Freizeitläufern ratsam zu sein.
Da wir hier die Arbeit oder Leistung nicht gemessen haben, nehmen wir als proxy Variable die Herzfrequenz (HF), vgl. Beitrag zur Laufleistung. Damit ist die Vermutung verbunden, dass x Herzschläge/min in der Ebene mit x Herzschlägen im profilierten Gelände Leistungsäquivalent sind. Wenn man die x Herzschläge in der Ebene für die Belastungszeit erbringen kann, dann sollte dies auch im profilierten Gelände möglich sein, wenn man Berge im Trainingsprogramm hat.
Die anderen durch Belastung und Steigung tangierten Messgrößen Kadenz, Standzeit und Vertikalhub werden zu einem Vektor y zusammengefasst und um den Einfluss von Herzfrequenz und Steigung bereinigt. Dies ist nötig, da sich sonst der Einfluss der Steigung auf das Tempo aufgrund Kolinearität nicht von den anderen Messungen trennen lässt. Für die Konstruktion der Funktion v=v(HF, Steigung | Kadenz, Standzeit, Vertikalhub) poolen wir Daten aus verschiedenen Läufen (einer Person, derzeit ca. 8300 Beobachtungen) und schätzen mit einem Regressionsansatz die Modelle
für unterschiedliche Steigungsklassen k. Die Steigungsklassen geben hier die nötige Flexibilität, den realen Verlauf gut zu approximieren und ermöglichen eine Asymmetrie in den Höhenlinien (≠ Ellipsoid mit 2 Hauptachsen), so dass die geschätzte Beziehung nur lokal quadratisch ist. Diese Lokalität wird im Regressionsansatz mit Gewichten für die Residuen nachgebildet.
Für die Geschwindigkeitsprognose zu einem Punkt (HF, Steigung) wird dann einfach eine gewichtete Linearkombination von der benachbarten Polynome ausgewertet.
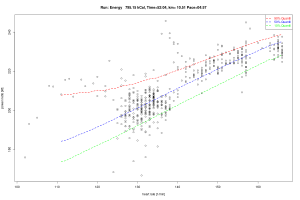
Geschätzte Beziehung zwischen Geschwindigkeit, Steigung und Herzfrequenz beim Laufen
Bei einer Steigung von ca. 18% – 20% (das ist der Fähr-Rödel Anstieg an der Wupper in Leichlingen) wird bei einem Herzschlag von ca. 143 Schläge/min eine Geschwindigkeit von ca. 7.5 km/h erzielt. Das entspricht einem Vertikalaufstieg vom 1.350 m/Std und ist schon ziemlich sportlich, wenn man es mit Radfahrwerten vergleicht. Wenn man von diesem Punkt ausgehend bei gleicher Herzfrequenz Richtung 0% Steigung geht, nimmt die Geschwindigkeit zu. Bei 0% Steigung dürfte man dann ca. 13 km/h erreicht haben. In der Ebene würde man demnach 73,33% schneller laufen. Das Flachstreckenäquivalent zu einem Kilometer mit 18% Steigung ist somit 1,73 km.
Die blaue Linie markiert die Minimalpulswerte im Gefälle zu gegebener Geschwindigkeit. Darüber hinaus muss der Läufer seine Herzfrequenz steigern um das Tempo zu halten, obwohl das Gefälle zunimmt. Diese Grenze wird man deshalb nur ungern überschreiten.
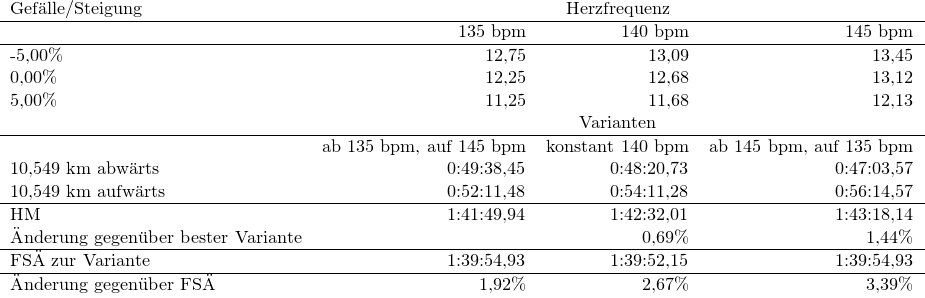
Variantrechnungen zu Halbmarathon (HM) mit durchschnittlich 140 bpm Herzfrequenz
Die Flachstreckenzeit mit konstanten 140 bpm ist hier erwartungsgemäß am niedrigsten. Darauf folgt dann die 1. Variante mit langsamen Abstieg und schnellem Aufstieg. Konstante 140 bpm führen zu einer Verschlechterung von 0,69%. Und die Variante mit „Gas runter“ und bergauf langsamer schneidet am schlechtesten ab. Dort ist man dann auch beim „downhill“ jenseits der blauen Linie in der vorausgegangenen Grafik. Das FSÄ liegt ungefähr bei 1:40 und ist gegenüber der schlechtesten Variante um 3,4% besser.
Gegenüberstellung zur Naismith’s rule:
Hier wird davon ausgegangen das für zusätzliche 600 HM eine Stunde benötigt wird. Bei 13 km mit 18% Steigung kommt man auf 2.340 HM was zu einem Zuschlag von 13*0.18/0.6=3.9 Stunden führt. Für die 13 km werden jetzt 1+3.9 Stunden benötigt und die Geschwindigkeit beträgt somit 13/4.9=2.63 km/h. Wenn man jetzt abweichend den Naismith Zuschlag halbiert – laufen statt wandern – kommt man auf 4.41 km/h und damit noch weit unter den hier gemessenen Werten.
Anmerkung zu Daten, Verfahren und Anwendung:
Die Karte beruht auf individuellen Laufdaten und reflektiert das Leistungsniveau eines Athleten, ist also nicht ohne weiteres auf andere Läufer übertragbar. Insbesondere dürfte das Gewicht des Sportlers Einfluss auf den Abstand der Isogeschwindigkeitslinien haben. Vermutlich liegen diese bei leichteren Läufern enger zusammen und bei Schwereren weiter auseinander.
Die zugrunde liegenden Messwerte sind als weiße Punkte dargestellt. Regionen der Karte, in denen kaum Punkte liegen, dürften mit großen Vertrauensbereichen (=Unsicherheit) abgebildet sein. Man sieht hier, dass dieser Läufer überwiegend im Flachen läuft und würde deshalb schon zu gemäßigtem Pace am Berg raten.
Schaut man sich die Region um das Geschwindigkeitsmaximum an, so sind die Höhenlinien nicht symmetrisch um die 0% Steigungsachse, sondern leicht nach links „ausgebeult/verschoben“. Das entspricht auch den Erwartungen und man sollte in diesem Bereich („Mit Vollgas den Berg herunter“) testweise mehr Daten sammeln, auch wenn das langfristig für Knie und Fuß ungünstig seien könnte.
Ebenso wäre es interessant, den Berg mal langsamer mit niedriger Herzfrequenz hoch zu laufen. Damit könnte man die Herzfrequenzabhängigkeit des FSÄ abschätzen. Es stellt sich die Frage, ob der Geschwindigkeitsertrag einer gesteigerten Herzfrequenz überall der gleiche ist. Nach diesen Berechnungen, liegt der Ertrag im mittleren Bereich am niedrigsten d.h. die Höhenlinien sind weit auseinander. Das kann aber auch auf die dünne Datenbasis an den Rändern zurück zuführen sein.
Wie bereits vorher erwähnt, kann es bei steilen Passagen sinnvoller sein, einen Gangartwechsel vorzunehmen d.h. zu gehen. Das ist hier nicht abgebildet. Vermutlich ist dies ab ca. 6-7 km/h die bessere Wahl.
Man könnte versuchen, den Steigungsinduzierten Geschwindigkeitsverlust bei gleicher Herzfrequenz in Leistung d.h. Watt umzurechnen.
Wie berechnet man nun das FSÄ für einen ganzen Lauf? Am besten nicht zu Fuß und per Hand!
Hat man den profilierten Lauf mit Herzfrequenz und Geschwindigkeit vorliegen, schaut man für jedes Segment in der Funktion v=v(HF, Steigung) den Wert v=v(HF, Steigung=0) nach und berechnet den Aufschlag fürs Gelände. Hier kann es eventuell günstig sein, einen Korrekturfaktor c aus der Funktion v(HF, Steigung) und der beobachteten Geschwindigkeit v zu berücksichtigen und c*v(HF, Steigung=0) anzusetzen. Letztlich hängt dies mit der Frage zusammen, welchen Daten man mehr Vertrauen schenkt: der ermittelten Karte oder dem aufgezeichneten Track (Länge, Höhe) mit Herzfrequenz (vgl. die diskutierten Fehlerquellen bei der Messung).
Hat man nur den GPS-Track ohne HF vorliegen, muss man für die HF eine realistische Annahme machen z.B HF=Mittelwert und ermittelt den Wert v=v(HF=Mittelwert, Steigung=0) und daraus den Aufschlag.
Bei diesen Berechnungen sollte man das Höhenprofil des Laufs anschauen und offensichtliche Ausreißer oder häufiges Auf und Ab (Rauschen) durch geeignete Methoden zuvor entfernen.
Continued: „Fähr-Rödel“
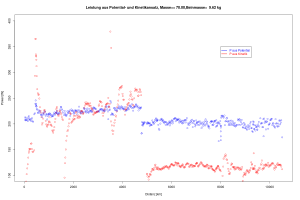
Für den Eingangs dargestellten Lauf wird nun das Flachstreckentempo und das Flachstreckenäquivalent berechnet. Dazu wird zunächst ein Korrekturfaktor c mit
berechnet. ist dann die geschätzte Geschwindigkeit zu gegebener Herzfrequenz (i) und Steigung (i) die im Mittel mit den Daten der Laufuhr übereinstimmt. Für das Flachstreckenäquivalent müssen jetzt nur noch die Werte berechnet werden. Diese sind in der folgenden Grafik dargestellt.
Das FSÄ ist hier 560 m länger als der zurückgelegte Weg, was erstaunlich wenig ist, angesichts der „Quälerei“ am Aufstieg „Fähr-Rödel“ mit ca. 20% Steigung. Immerhin wird diese mit über 14 km/h honoriert. Aber es gibt eben auch Abzüge für die Gefällestücke, die man hätte schneller laufen können. Im Flachen wäre man auf dieser Strecke deshalb nur 2.5% schneller gewesen. Beide geschätzte Zeitreihen zeigen eine deutlich niedrigere Streuung in der Geschwindigkeit als die Messungen der Laufuhr, was positiv zu bewerten ist, da die „spikes“ sehr wahrscheinlich Ausreißer sind.
Dieser Lauf wurde auch nach strava hochgeladen und wird dort mit einem mittlerem Tempo 5:01 und einem SAT-Tempo (das dürfte dem Flachstreckenäquivalent entsprechen) von 4:56 ausgewiesen. Die Höhe hat also bei strava zu einem Abzug von 5 Sekunden/km geführt, während dieses Modell zu einem Abzug von 7,46 Sekunden/km führt. Damit fällt die Honorierung der Höhenleistung noch schwächer aus und daran darf gezweifelt werden. Umgekehrt bedeutet dies, dass die Zuschläge für Höhenmeter wahrscheinlich zu gering sind und dies kann zu unangenehmen Fehleinschätzungen bei Bergläufen führen. Hier würde man aus Risikogründen schon lieber größere Werte ansetzen.
Am besten man probiert es einfach mal selber aus: Also Laufsachen anziehen und den nächsten Hügel in der Umgebung angehen. Dazu dann einen Lauf ähnlicher Länge und mit ähnlicher Herzfrequenz laufen und diese beiden Zeitreihen gegenüberstellen.
Die Leistung – gemessen in Watt – ist im Radsport eine zentrale Größe und kann selbst im Freizeitbereich mit Messgeräten zu erschwinglichen Preisen zuverlässig ±4% bestimmt werden. Diese messen die sogenannte äußere Leistung die auf Pedal, Kurbel oder Nabe wirkt und somit direkt geschwindigkeitswirksam ist. Der Athlet hat damit in „real time“ ein Leistungsfeedback.
Im Laufsport ist die Leistung aber bisher dem Freizeitläufer kaum zugänglich. Die Zweckmäßigkeit eines Laktattest zur Einstufung der Leistungsfähigkeit von Freizeitsportlern wird selbst vom DFB vor dem Kostenhintergrund bezweifelt. Daneben sind dies keine Echtzeit-Informationen und können so im konkreten Lauf kaum helfen.
Ein ähnliche Funktion wie die Echtzeit-Leistungsmessung im Radsport hat die Herzfrequenz im Laufsport, die mit Brustgurt oder mittlerweile auch mit optischen Sensoren am Handgelenk gemessen wird. Diese dürfte statistisch gesehen sehr hoch mit der Leistung korreliert sein.
Meine Erfahrungen aus dem Radsport gehen dahin, dass ein Watt-Messgerät ganz erheblich die Leistung steigern und objektivieren kann. Während die Herzfrequenz gefühlt eher das „sich quälen„ misst, ist die Leistung ein zuverlässiges Maß, an dem man sich orientieren kann. Unter widrigen Umständen – Steigung, Gegenwind, schlechter Untergrund, viele Kreuzungen – ist man ohne Wattmeter häufig unzufrieden mit der eigenen Leistung, obwohl kein Anlass dazu besteht. Unter günstigen Umständen ist es anders herum. Man gibt sich zufrieden, obwohl noch viel mehr möglich ist.
Daneben ist es aus Sicht des Autors schon fast pathologisch, die Laufleistung mit dem „sich quälen“ abzuschätzen. Das Ziel sollte doch eher darin bestehen, eine Laufleistung mit möglichst wenig Schmerz zu erbringen. Vermutlich führt dieses „sich quälen“ Paradigma gepaart mit Ehrgeiz bei unerfahrenen Läufern zu den Sportverletzungen an Fuß, Knie und Bein.
Das Problem ist aber, dass man die Leistung im Laufsport in der Regel nicht vorliegen hat. Deshalb soll im Folgenden die Leistung aus den Datenfeldern einer Laufuhr abgeleitet werden. Der hier verfolgte Ansatz orientiert sich an den Gleichungen von Dr. Lälles erklärt’s . Dieser Ansatz baut im wesentlichen auf der Veränderung der potentiellen Energie d.h. der Lageenergie bei einem Laufschritt auf.
Zeit, Vertikal Hub, Kadenz und Geschwindigkeit werden von der Laufuhr gemessen. Hier muss aber beachtet werden, dass diese Daten mit Fehlern und Ausreißern behaftet sind.
Die anderen Konstanten sind der Literatur – insbesondere Dr. Lälles erklärt’s entnommen – sowie geringfügig modifiziert worden um zu vergleichbaren Ergebnissen bei der Gesamtkalorienmenge W(Lauf) zu kommen. Insbesondere ist die Gleichung für Beinbeschleunigung angepasst worden. Widerstandskräfte wie isometrische Arbeit und Reibung in den Gelenken sind hier nicht explizit berücksichtigt und schlagen sich so im Wirkungsgrad η nieder.
Gegen- oder Rückenwind sind nicht abgebildet.
Ebenfalls sind Auf- und Anstiege nicht modelliert. Hier würde sich zudem die Frage stellen, ob die Anstiege zu einem gewissen Teil schon im Vertikalhub enthalten sind.
Die Nettoleistung ist die äußere Leistung die für die Bewegung nötig ist. Die Bruttoleistung ist die Leistung die der Körper erbringen muss. Dazwischen liegen Grundumsatz und Wirkungsgrad η.
Bei allen Variablen ist auf die Verwendung von SI – Einheiten zu achten (m/s, 1/s) bzw. entsprechend umzurechnen.
Da hier nur die Grundrechenarten in überschaulicher Anzahl verwendet werden, spricht nichts dagegen dies in Echtzeit in einer Laufuhr auszuführen und anzuzeigen. Bei der Garmin Fenix 3 ist dies derzeit aber nicht vorgesehen.
Die Nettoleistung steht damit in Abhängigkeit von
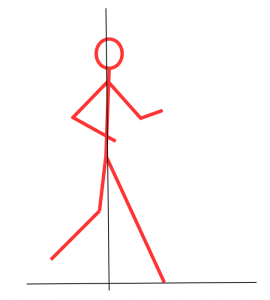
wobei fürs Freizeitlaufen aus dem ersten Term mehr als 80% der Leistung kommen dürfte. Demnach würde ein um 1% gesteigerter Hub und eine um 1% gesenkte Kadenz ungefähr zur gleichen Leistung führen. Das mag physikalisch erklärbar sein, für den Läufer dürfte dies aber nicht ratsam sein. Man sollte im Gegenteil bei konstanter Leistung eher die Kadenz erhöhen und den vertikal Hub senken. Dies wird deutlich, wenn man zusätzlich die Schrittweite S betrachtet. Bei konstanter Schrittweite würde die erste Variante mit gesenkter Kadenz nämlich auch zu einer 1% niedrigeren Geschwindigkeit führen. Der Bezug des Vertikalhubs zur Geschwindigkeit ist eindrucksvoll in folgender Grafik dargestellt.
Quelle: Weidt, M. und T. Wilhelm (2015) Gehen und Laufen im Physikunterricht, S. 8
Man sieht in der Abbildung deutlich, dass hier beim Joggen der Kopf – und mit ihm der Schwerpunkt – deutlich stärker vertikal ausgelenkt wird als beim Sprint.
Nimmt man die Gleichung für die Hubleistung und nutzt den Zusammenhang zwischen Geschwindigkeit, Kadenz und Schrittweite nach so ergibt sich, da . Bei konstanter Hubleistung, Hub und Schrittweite führt eine um 1% gesteigerte Masse zu einer Geschwindigkeitssenkung von ebenfalls 1%. Leichte Läufer sind hier also im Vorteil, und so etwas ähnliches besingen auch „Silbermond“ mit
Du nimmst all den Ballast
und schmeisst ihn weg,
Denn es reist sich besser,
mit leichtem Gepäck.
Der Läufer sollte also möglichst lange Beine für den Schritt und möglichst wenig Masse haben. Da aber die Körperlänge sowohl mit Beinlänge als auch Masse positiv korreliert seien dürfte – zumindest bei Leichtathleten, behäbige Wohlstandsbürger ausgeklammert – liegt das Optimum irgendwo in der Mitte und Arne Gabius (derzeit 1.86m, 66kg) dürfte schon Aufgrund der Größe eher am rechten Rand der Verteilung bei Topläufern liegen.
Für eine möglichst schnelle und energetisch günstige Bewegung kann man das folgende Problem betrachten:
Die optimale Lösung hätte demnach maximale Geschwindigkeit (an der oberen Grenze des Möglichen) bei minimalen Winkel ϕ an der unteren Grenze.
Aber was hat man sich hier unter der Winkel ϕ vorzustellen? Formal ergibt er sich aus dem Verhältnis Hub zu Schrittweite. Eine damit positiv korrelierte Größe dürfte der Absprungwinkel sein. Das ist der Winkel, mit dem der Fuß den Boden verlässt. Und diesen kann der Läufer durch den „Laufstil“ beeinflussen. Mit
haben wir also eine instruktive Schreibweise für die Hubleistung gefunden. Dieser Fragestellung soll in einer weiteren Analyse nachgegangen werden. Insbesondere hängt hier die Leistung linear von der Geschwindigkeit ab. Diese Funktionsform findet man auch in der Literatur
Quelle: Waller, D. (2008), S.17
Leistung und Geschwindigkeit
Diese Gleichungen zur Leistung werden nun auf eine Trainingslaufaufzeichnung von Sportplatzrunden angewendet.
Die GPS Aufzeichnung deckt sich ganz gut mit dem Sportplatz und Ausreißer in Längen- und Breitengrad sind nicht erkennbar. Im Wald, Bergen oder Stadt mit schlechterem GPS Empfang können hier deutlichere Abweichungen auftreten. Ausreißer, die in Bewegungsrichtung liegen, können mit dieser topografischen Kontrolle natürlich nicht gefunden werden, obwohl sie auch zu einer Fehleinschätzung der Geschwindigkeit beitragen können.
Abbildung 1: Geschwindigkeit und Leistung zu Lauf auf Sportplatz
Die Ordinate ist hier nicht äquidistant skaliert, damit das Bild nicht zu sehr von den offensichtlichen Ausreißern am oberen Ende dominiert wird. Für die Luftwiderstandsgleichung () sind diese Werte besonders unangenehm. Deutlich erkennbar sind einige schnellere Runden am Anfang sowie gemütliches Laufen in der zweiten Hälfte. Die dicken blauen Linien sind das 5%, 50%, 95% Quantil der gemessenen Geschwindigkeiten. Mit roten Punkten sind die abgeleiteten Nettoleistungen dargestellt und es lässt sich schon hier ein enger Zusammenhang vermuten.
Exkurs kinetische Energie
Die Arbeit für die Beinbeschleunigung W(Bein) kann nach Rodewald mit
für jeden Schritt geschätzt werden. Das ist die aus der Schulphysik bekannte Gleichung für kinetische Energie, bezogen auf die Beine. Hat der Läufer eine konstante Geschwindigkeit erreicht – „steady state“ d.h. keine weitere Beschleunigung – so ist nach Rodewald
die Beingeschwindigkeit gleich der Laufgeschwindigkeit und
die Energie geht vollständig in den Widerständen (Reibung etc.) auf.
Dies stimmt natürlich nur im Groben. Denn bei jedem Lauf sind abwechselnd die Beine vor und hinter dem Schwerpunkt und müssen deshalb regelmäßig schneller und langsamer sein als der Läufer.
Nach Rodewald kann man die Beinmasse m(B) mit m(B) =1/8 m(Körper) abschätzen. Die Leistung ist dann die Arbeit bezogen auf die Schrittzeit t und damit
Rechenbeispiele:
Diese Berechnungen zeigen für hohe Geschwindigkeiten das richtige Niveau. Für niedrige Geschwindigkeiten wie z.B. 6:00 er pace, scheint die Nähe zum Grundumsatz untertrieben.
Die Gegenüberstellung der zwei Leistungsberechnungsarten zeigt deutliche Unterschiede
in der ersten schnelleren Hälfte stimmen die Leistungswerte zumindest im Mittel noch überein
die langsamere 2 Laufhälfte wird durch das kinetische Modell wahrscheinlich unterschätzt
das kinetische Modell zeigt die größere Streuung.
Berücksichtigt man, dass die Laufgeschwindigkeit mit gps Fehlern behaftet ist, dürften gerade diese durch den Term verstärkt werden. Deshalb wird dieser Ansatz zunächst nicht weiter verfolgt.
Beziehung der Leistung zu andere Messwerten der Laufuhr
Die von der Laufuhr aufgezeichneten Felder sind in der folgenden Grafik gegenüber gestellt.
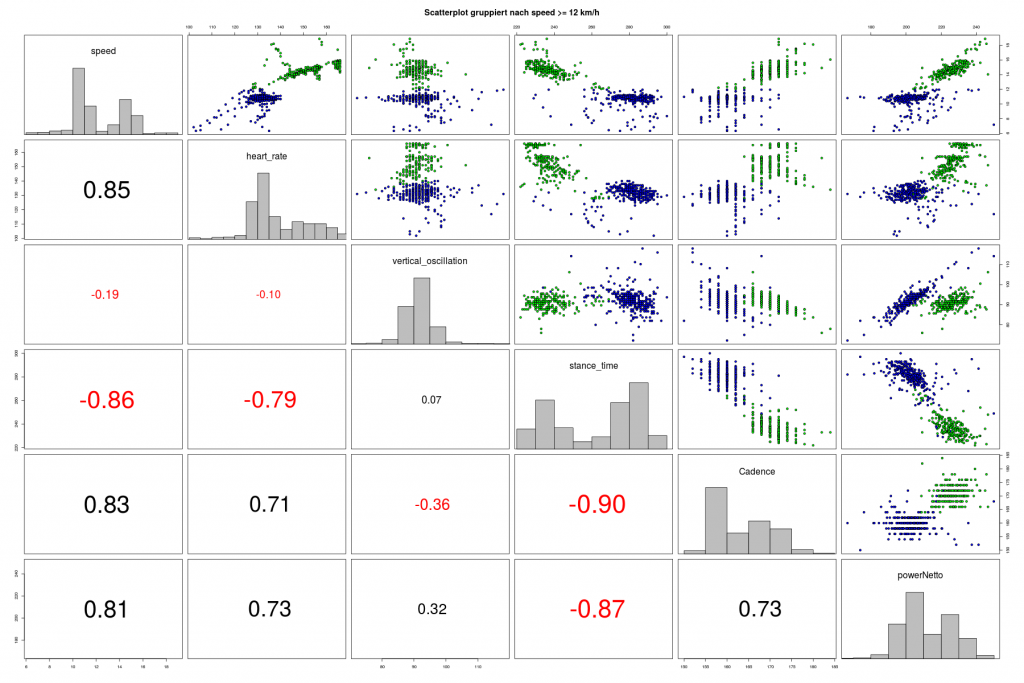
Abbildung 2: Scatterplot zum Lauf auf Sportplatz
Insgesamt erkennt man auch hier die beiden Laufhälften (kleiner oder größer 12km/h) in allen Beziehungen (oberes Dreieck) gut und es finden sich viele signifikante Korrelationen (unteres Dreieck). Die abgeleitete Leistung ist mit fast allen Größen bis auf den vertikal Hub pro Schritt (vertical oscillation) hoch korreliert. Das war so nicht zu erwarten, da der Löwenanteil der Leistung auf den Aufstieg pro Schritt zurück geht.
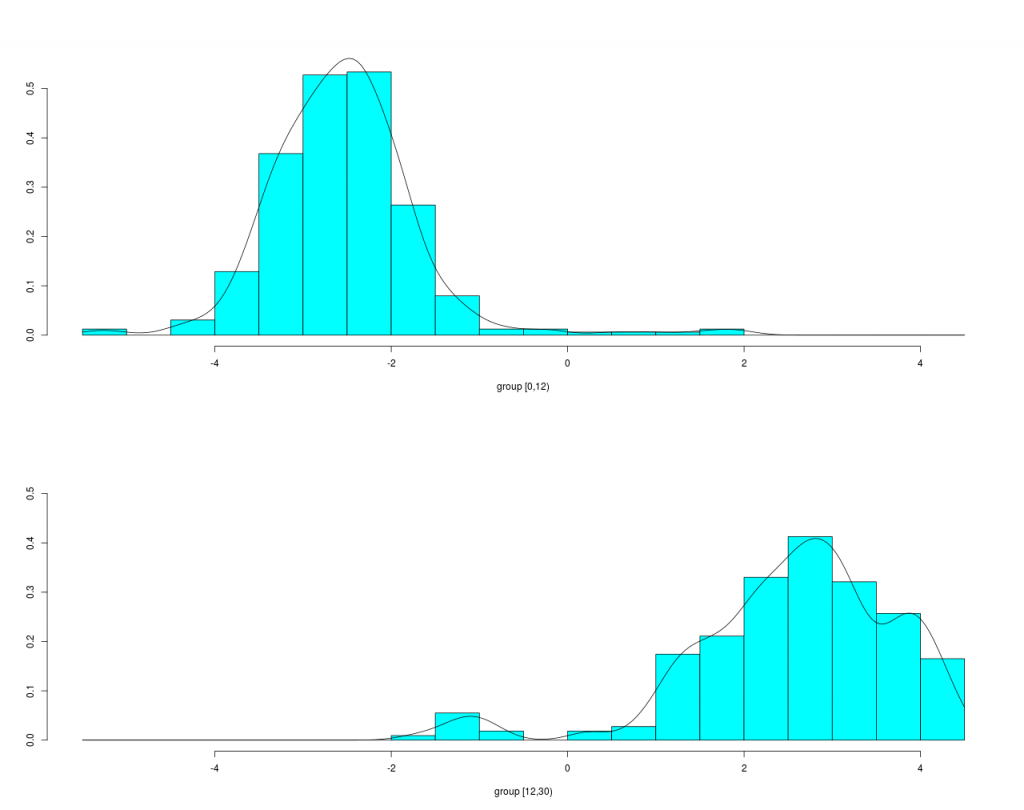
Der Scatterplot lässt vermuten, dass man den langsameren und schnelleren Teil des Laufs aufgrund der anderen Variablen gut trennen kann. Dazu wird eine lineares Diskriminanzmodell angesetzt.
Abbildung 2a: Trennung langsamer und schneller Läufe mit lineare Diskriminanzfunktion
Die Trennebene ist mit dem Vektor
gegeben. Demnach kann man an hoher Herzfrequenz & Kadenz sowie niedriger Bodenkontaktzeit und geringem Vertikalhub langsame von schnellen Läufen relativ gut trennen. Wir haben damit einen empirischen Beleg für weit verbreitete Thesen in der Laufliteratur, die jeder Besitzer einer „neueren“ Laufuhr tagtäglich prüfen kann. Da auch hier die Berechnung für gegebenen LD1 Vektor linear und relativ einfach ist, könnte die Ausgabe auch in Echtzeit erfolgen.
Schätzung der maximalen Leistung
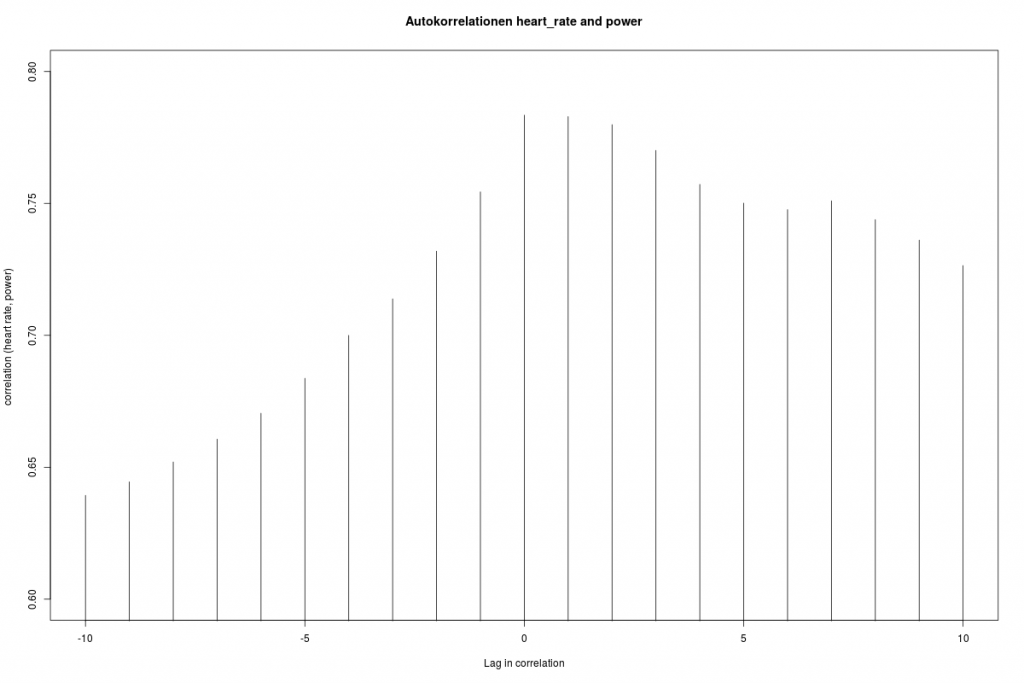
Der Zusammenhang zwischen Leistung und Herzfrequenz soll mit Quantil-Regressionsmodellen weiter untersucht werden. Die Herzfrequenz wird hier als Steuerungsgröße für die Leistung aufgefasst. In der Fachliteratur findet man gelegentlich den Hinweis, dass die Herzfrequenz der Leistung hinterher eilt. Um dies zu prüfen, werden die „gelagten“ Korrelationen power(t), heart_rate(t-L) berechnet.
Insgesamt zeigt sich hier schon ein hoher Zusammenhang. Die höchste Korrelation wird beim Lag=0 angenommen: dies spricht für keinen zeitlichen Versatz. Es zeigt sich aber auch, dass ein Lag von 1 kaum zu Einbußen führt. Im Weiteren wird ohne Lag gearbeitet.
Abbildung 3: Leistung und Herzfrequenz
(a) Quantil Regression mit quadratischer Form (b) parametrische Quantil Regression
Beide Regressionen zeigen eine mit der Herzfrequenz steigende Leistung.
Bei der quadratischen Form ist diese deutlich degressiv, wobei dies sicherlich auch an der vorgegebenen Funktionsform liegt. Ferner lässt sich ein Leistungsmaximum bei ca. 230 Watt erahnen. Das stimmt auch relativ gut mit der oberen Leistungsgrenze für 1 Std Radfahrt beim Autor überein.
Bei der parametrischen Regression kann man zwar auch eine Leistungsdegression erahnen, das Maximum dürfte demnach aber Höher liegen. Das wiederum deckt sich ganz gut mit der Pace im 10km Wettkampf des Autors, die höher liegt und in dieser Runde nicht erreicht wurde.
Zerlegung der Geschwindigkeit in Einflussgrößen
Abschließend soll der Einfluss dieser Variablen auf das Tempo identifiziert werden. Dazu wird ein IRLS Ansatz für ein Regressionsmodell gemacht.
Abbildung 4: Regressionsmodell zur Identifizierung der geschwindigkeitsbestimmenden Variablen
Sämtliche Koeffizienten haben das fachlich erwartete Vorzeichen, auch wenn „stance_time_percent“ nicht signifikant ist. Dies wird auch an der im Scatterplot deutlich erkennbaren negativen Korrelation liegen. Der größte Einfluss geht von der Leistung aus, gefolgt von der Herzfrequenz. „vertical_oscillation“ also der Vertikalhub pro Schritt hat ein negatives Vorzeichen, was auch den Theorien entspricht. Die Kadenz konnte nicht mit einbezogen werden, da sie hoch mit power korreliert ist (vgl. power Ableitung) und damit nicht sicher zwischen beiden Einflüssen unterschieden werden kann.
Ausblick
Das vorgestellte Leistungsmodell basiert im wesentlich auf Vertikalhub, Kadenz und Geschwindigkeit des Läufers, die in Echtzeit messbar sind. Für einen weiteren Ausbau des Modells
sollten die anderen physikalischen Modelle zum Gehen und Laufen wie. z.B. kinetischer Ansatz, umgekehrtes Pendel, Feder-Masse-Modell geprüft werden
sollte man insbesondere stärker physiologisch orientierte Modelle untersuchen, denn dieser Aspekt ist hier mit dem Wirkungsgrad η und Herzfrequenz nur sehr rudimentär abgebildet.
sollte der Absprungwinkel ϕ weiter betrachtet werden, zumal er sich ebenfalls aus den Daten der Laufuhr abschätzen lässt
sollten Auf- und Abstiege einbezogen werden
das Modell an einer breiteren Datenbasis kalibrieren. Dazu könnte man im Lauftreff Messungen bei den Mitgliedern durchführen und im Rahmen einer Querschnittanalyse das Modell anpassen und ergänzen.
Literatur
Müller, R. (2006) Die Physik des Gehens als Unterrichtsfach, TU Braunschweig
https://www.tu-braunschweig.de/Medien-DB/ifdn-physik/gehen-und-laufen.pdf
Rodewald, B. u. H.J. Schlichting (1988) Springen, Gehen, Laufen, Praxis der Naturwissenschaften-Physik 37/5 (1988) S. 12-14
https://www.uni-muenster.de/imperia/md/content/fachbereich_physik/didaktik_physik/publikationen/springen_gehen_laufen.pdf
Rottler, A. (2014) Dr. Lälles erklärt’s
http://www.laufen-in-siegen.de/index.php/dr-laelles-erklaert-s/laelles-uebersicht
Waller, D. (2008) Physics meets Sports: Biomechanische Modelle Gehen und Laufen
http://tennisfragen.de/wordpress/wp-content/uploads/2011/11/Gehen-und-Laufen-Waller-UNI-Regensburg.pdf
Weidt, M. und T. Wilhelm (2015) Gehen und Laufen im Physikunterricht
http://www.thomas-wilhelm.net/veroeffentlichung/Gehen.pdf
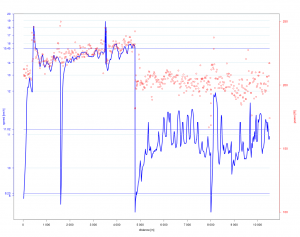
Ein Lauf mit der Garmin Fenix 3 Laufuhr produziert schon für kleine Laufeinheiten eine relativ große Datenmenge die im Garmin *.fit Format auf der Uhr abgespeichert wird. In der Regel hat der User seine Laufuhr mit dem Handy gekoppelt oder überträgt per WLAN diese Daten an sein zuvor eingerichtetes Garmin-Connect Konto. Sind die Daten übertragen kann, man sich dazu Auswertungen in seinem Konto anschauen. Der Pace-Graph sieht in Garmin Connect dann z.B. so aus:
Hier sticht im ersten Moment der sehr „volatile“ Verlauf der Zeitreihe ins Auge. Da der Autor selber diese Strecke gelaufen ist, kann er die „spikes“ mit z.B. 3:07 min/km sicher ausschließen d.h. dies sind ausschließlich GPS-Messfehler. Diese spikes haben unangenehme Eigenschaften:
Das Minimum und Maximum der Zeitreihe besteht i.d.R nur aus Messfehlern.
Liegt ein spike in einem kurzen Laufsegment, wird der Mittelwert stark verzerrt.
Die spikes verstellen den Blick aufs Ganze da man kaum Trends, die Wirkung von Anstiegen etc. ausmachen kann.
Die Skalierung der Ordinate fällt durch die spikes ungünstig aus.
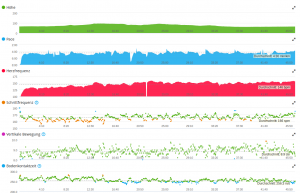
Daneben gibt es noch eine weitere Sicht in Garmin Connect auf den Lauf.
die Skalierung der Achsen ist nicht immer befriedigend
Die Wahl des Zeichenmodus – gefüllte Fläche, Linie Punkte – ist vorgegeben
Die Daten können nur über Zeit oder Distanz auf der Abszisse gezeichnet werden. Insbesondere wird jede andere multivariate Betrachtung nicht unterstützt.
Zusammenfassend kann man für die Grafiken festhalten:
Lokal kommt es zu großen Verzerrungen im Tempo
Die Sicht auf die Laufdaten ist vielfach unbefriedigend
Ein kausaler Zusammenhang zwischen Tempo und den anderen Messgrößen kann grafisch kaum abgeleitet werden. Das sind aber die Größen, an denen der Läufer arbeiten kann, um seine Pace zu verbessern.
Das ganze Prozedere von Lauf bis abschließender Analyse wirft die Frage auf, wer Eigentümer und Besitzer der Daten ist. Für viele Läufer dürfte der Besitz d.h. die Verfügung über das Eigentum sehr eingeschränkt sein. Man hat eigentlich nur eine voreingestellte Sicht auf die Daten, kann aber nicht mit ihnen arbeiten. Der Autor hat bis jetzt noch kein frei zugängliches Tool wie z.B. gps-babel gefunden, dass sämtliche Felder des Fenix3 fit-file ausließt. Deshalb wurde hier der „harte“ Weg beschritten, der aber Programmierkenntnisse voraussetzt. Dazu beschafft man sich ein Garmin SDK, spielt dieses in eine Entwicklungsumgebung ein und erstellt sich per Programm die nötigen Dateien aus dem fit Format. Diese kann man dann z.B. mit GNU R auswerten.
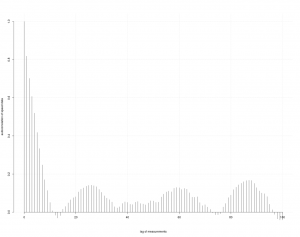
Die Zeitreihe Tempo zu diesem Lauf weißt folgende Autokorrelationen auf:
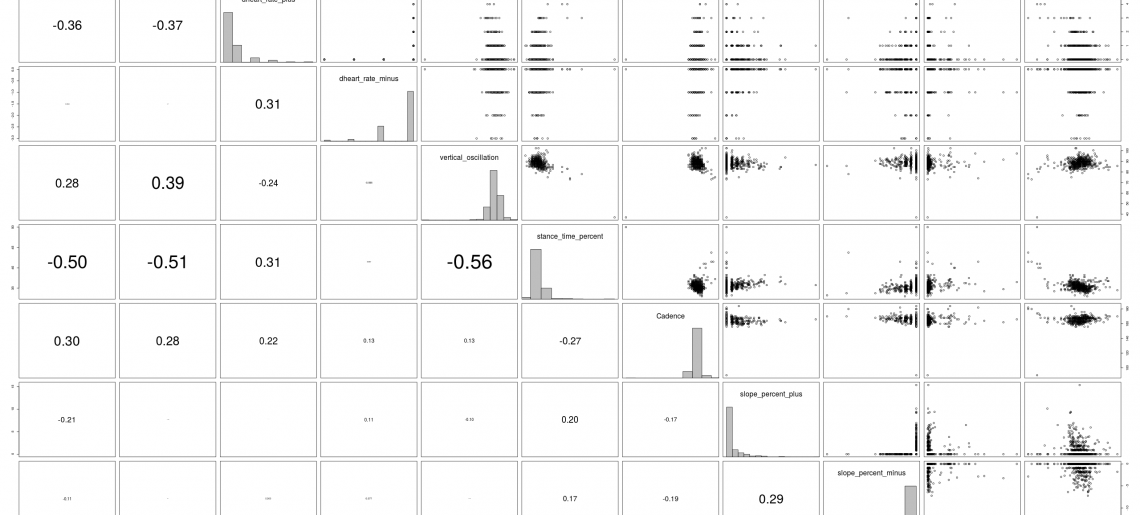
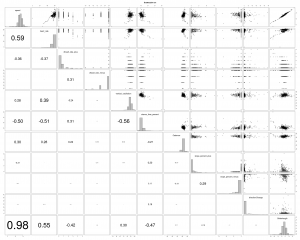
Es zeigt sich also ein signifikanter positiver Zusammenhang für die ersten ca. 10 Lags, der auch zu erwarten war. Danach ist kein signifikanter Einfluss mehr erkennbar. Als Einstieg in die multivariate Datenanalyse bietet sich häufig ein Scatterplot an.
Auf der Hauptdiagonalen befinden sich die Histogramme zu den Variablen, im oberen Dreieck die Scatterplots und im unteren Dreieck die Korrelationen. Uns interessiert hier zunächst der Zusammenhang zwischen Speed und den anderen Variablen. Im Scatterplot sind das die erste Zeile und erste Spalte. Demnach ist der Zusammenhang zwischen Speed und (stride length, heart rate, stance time %) am stärksten und mit dem fachlich erwarteten Vorzeichen ausgeprägt.
stride length: Die Schrittlänge wird bei Garmin über Schrittfrequenz und zurückgelegten Weg ermittelt. Sie ist deshalb mit den selben Fehlern des GPS Signals behaftet aus denen die Geschwindigkeit ermittelt wird. Die hohe Korrelation könnte auf diesem Fehler-Zusammenhang beruhen.
heart rate wird über den Brustgurt gemessen. Ist dieser am Anfang des Laufs nicht feucht, kann es zu größeren Fehlen kommen. Der Autor hält deshalb den Brustgurt vorher kurz unter warmes Wasser.
stance time % wird über die Erschütterung gemessen. Je länger man auf dem Boden bleibt, desto schlechter die Pace.
Für diese Daten wird nun folgendes linear homogene Modell (d.h. ohne Konstante) in R angesetzt:
Um den spikes entgegen zu wirken wird ein IRLS (vgl. https://en.wikipedia.org/wiki/Iteratively_reweighted_least_squares) Ansatz mit reziproken Gewichten zur Nachbildung der L1-Norm gewählt.
Independent Variable
Estimate
Std. Error
t value
Pr(>|t|)
signif
time
-1,38E-003
1,85E-004
-7,438
4,12E-013
***
time2
3,43E-007
5,40E-008
6,346
4,74E-010
***
heart_rate
1,80E-001
1,93E-002
9,332
< 2e-16
***
heart_rate_lag1
-1,03E-002
2,57E-003
-3,985
7,69E-005
***
heart_rate2
-3,14E-004
7,81E-005
-4,018
6,70E-005
***
vertical_climb_plus
-1,20E-003
1,36E-004
-8,777
< 2e-16
***
vertical_climb_minus
-2,38E-004
1,13E-004
-2,111
0,0352
*
cadence
4,66E-002
6,62E-003
7,048
5,66E-012
***
stance_time_percent
-3,13E-001
2,87E-002
-10,924
< 2e-16
***
vertical_oscillation
-2,20E-003
7,89E-003
-0,278
0,7808
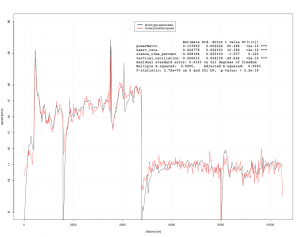
und eine hochsignifikante Regression: Residual standard error: 0.855 on 532 degrees of freedom
Multiple R-squared: 0.9984, Adjusted R-squared: 0.9984
F-statistic: 3.345e+04 on 10 and 532 DF, p-value: < 2.2e-16
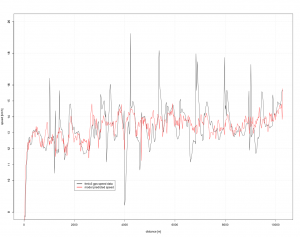
Die Zeit geht mit 2 Termen (time, time2=time*time) ein. Hier wird eine nach oben offene Parabel im Wertebereich [-1.4; -0.2] km/h geschätzt mit Minimum auf dem letzten Drittel des Laufs. Die Herzfrequenz geht mit 3 Termen ein (heart_rate, heart_rate2, heart_rate_lag1). Bezüglich des quadratischen Teils (heart_rate, heart_rate2) zeigt sich ein erwartungsgemäß degressiver Verlauf d.h. abnehmender Grenznutzen des sich „quälen“. Die Variable heart_rate_lag1 hat ein negatives Vorzeichen d.h. je niedriger die Herzfrequenz in der Vorperiode desto höher die aktuelle Geschwindigkeit. Die Variablen zum Anstieg gemessen in Höhenmeter/Zeit haben das erwartete Vorzeichen. Hier fällt auf, dass der Tempoverlust beim Anstieg größer ausfällt als der Tempogewinn bei „downhill“ bzw. dieser nur mäßig signifikant ist . Eine Erklärung hierfür könnte sein, dass man sich beim Bergablauf ausruht. Die Schrittfrequenz hat erwartungsgemäß einen positiven Einfluss aufs Tempo. Die Verweildauer auf dem Boden hat erwartungsgemäß einen negativen Einfluss aufs Tempo. Die Hebung des Oberkörpers (vertical_oscillation) hat hier einen negativen, aber nicht signifikanten Einfluss. Das Vorzeichen entspricht hier der fachlichen Theorie, aber wahrscheinlich ist dieser Zusammenhang eher über eine Querschnittsstudie – Vergleich mehrer Läufer – und über längere Distanzen nachweisbar. Die Gegenüberstellung von Rohdaten und Modellprognose führt zu folgender Grafik:
Die Modellprognose verläuft hier schon deutlich ruhiger und realistischer. Die spikes sind erfolgreich eliminiert worden.


![\[E_{pot}=mgh\]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-0e9f442a6e2e2bc2cffca832746fb01d_l3.png "Rendered by QuickLaTeX.com")
![\[E_{kin}=\frac{1}{2} mv^{\bf 2} \mbox{ mit Fallgeschwindigkeit } v=\sqrt{2gh}\]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-4b24d26f40b9599da5649a2de4f4a1fb_l3.png "Rendered by QuickLaTeX.com")


![\[ \mbox{HM} = \sum_t \max{(H_t-H_{t-1},0}) = \sum_t \max{(\Delta H_t,0})\]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-5605a1b2723746000112163622eadb41_l3.png "Rendered by QuickLaTeX.com")
 für ein Segment i erfolgen. Da die Zeit gut – ohne Fehler – gemessen werden kann, hängt nun der Fehler von der Geschwindigkeitsungenauigkeit ab. Da die Geschwindigkeit i.d.R bei einer GPS Laufuhr mit einem Glättungsverfahren z.B.
für ein Segment i erfolgen. Da die Zeit gut – ohne Fehler – gemessen werden kann, hängt nun der Fehler von der Geschwindigkeitsungenauigkeit ab. Da die Geschwindigkeit i.d.R bei einer GPS Laufuhr mit einem Glättungsverfahren z.B. 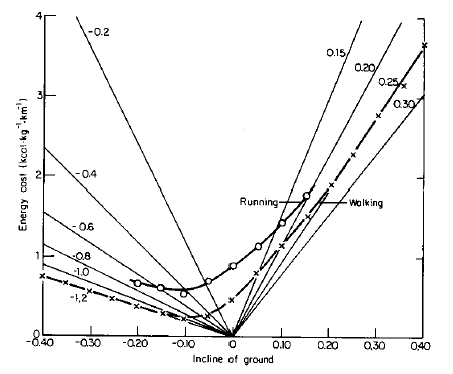

 für die Residuen nachgebildet.
für die Residuen nachgebildet. der benachbarten Polynome ausgewertet.
der benachbarten Polynome ausgewertet.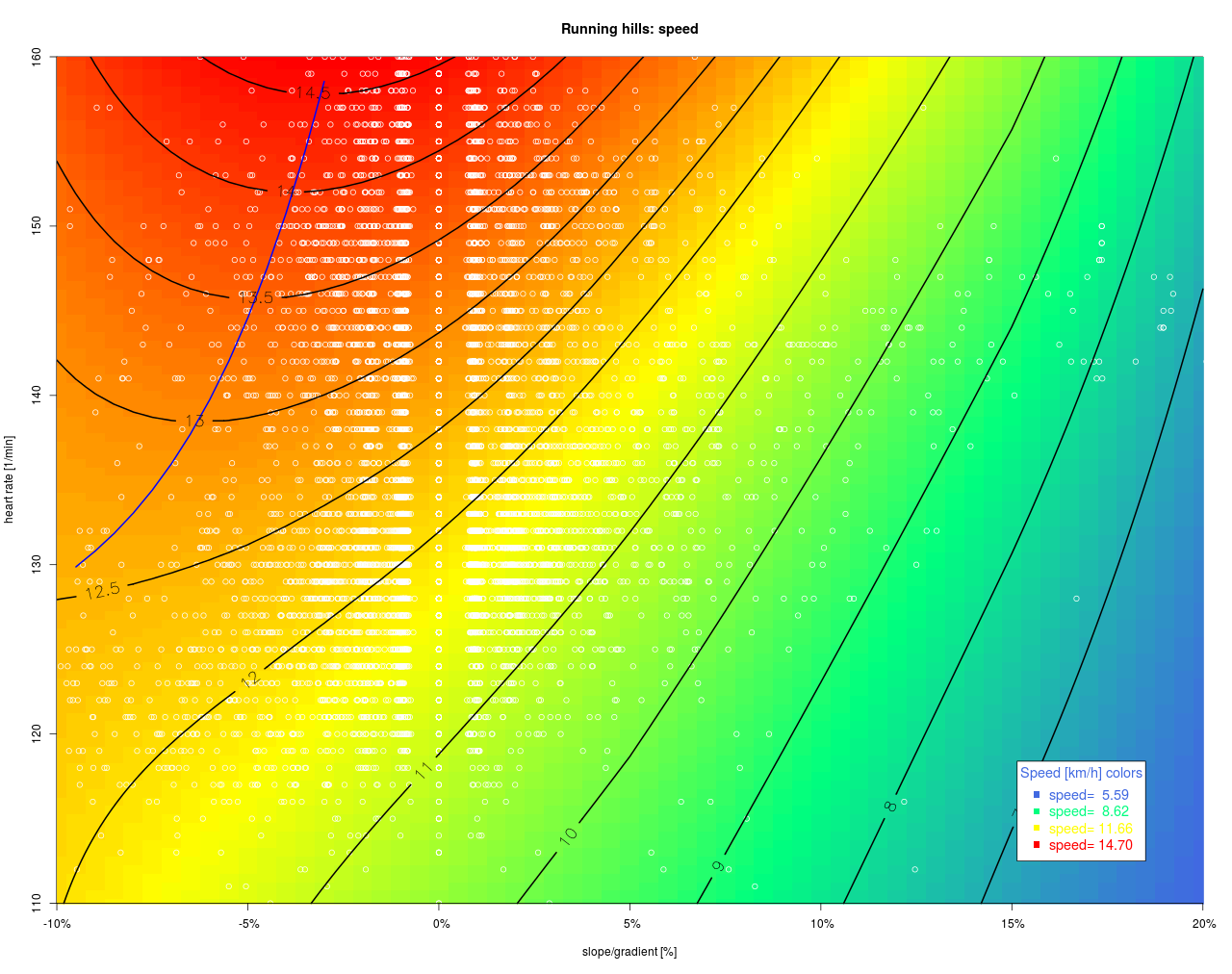
![\[ c = \frac{\bar{v}}{\bar{\hat{v}}}, \quad \bar{v}= \frac{ \sum_i \mbox{\small distance}_i}{\sum_i t_i}, \quad \bar{\hat{v}} = 1/N \sum_i^N v(\mbox{\small HF}_i, \mbox{\small Steigung}_i) \]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-1095f149f52780055e1fd9347bc85da2_l3.png "Rendered by QuickLaTeX.com")
 ist dann die geschätzte Geschwindigkeit zu gegebener Herzfrequenz (i) und Steigung (i) die im Mittel mit den Daten der Laufuhr übereinstimmt. Für das Flachstreckenäquivalent müssen jetzt nur noch die Werte
ist dann die geschätzte Geschwindigkeit zu gegebener Herzfrequenz (i) und Steigung (i) die im Mittel mit den Daten der Laufuhr übereinstimmt. Für das Flachstreckenäquivalent müssen jetzt nur noch die Werte  berechnet werden. Diese sind in der folgenden Grafik dargestellt.
berechnet werden. Diese sind in der folgenden Grafik dargestellt.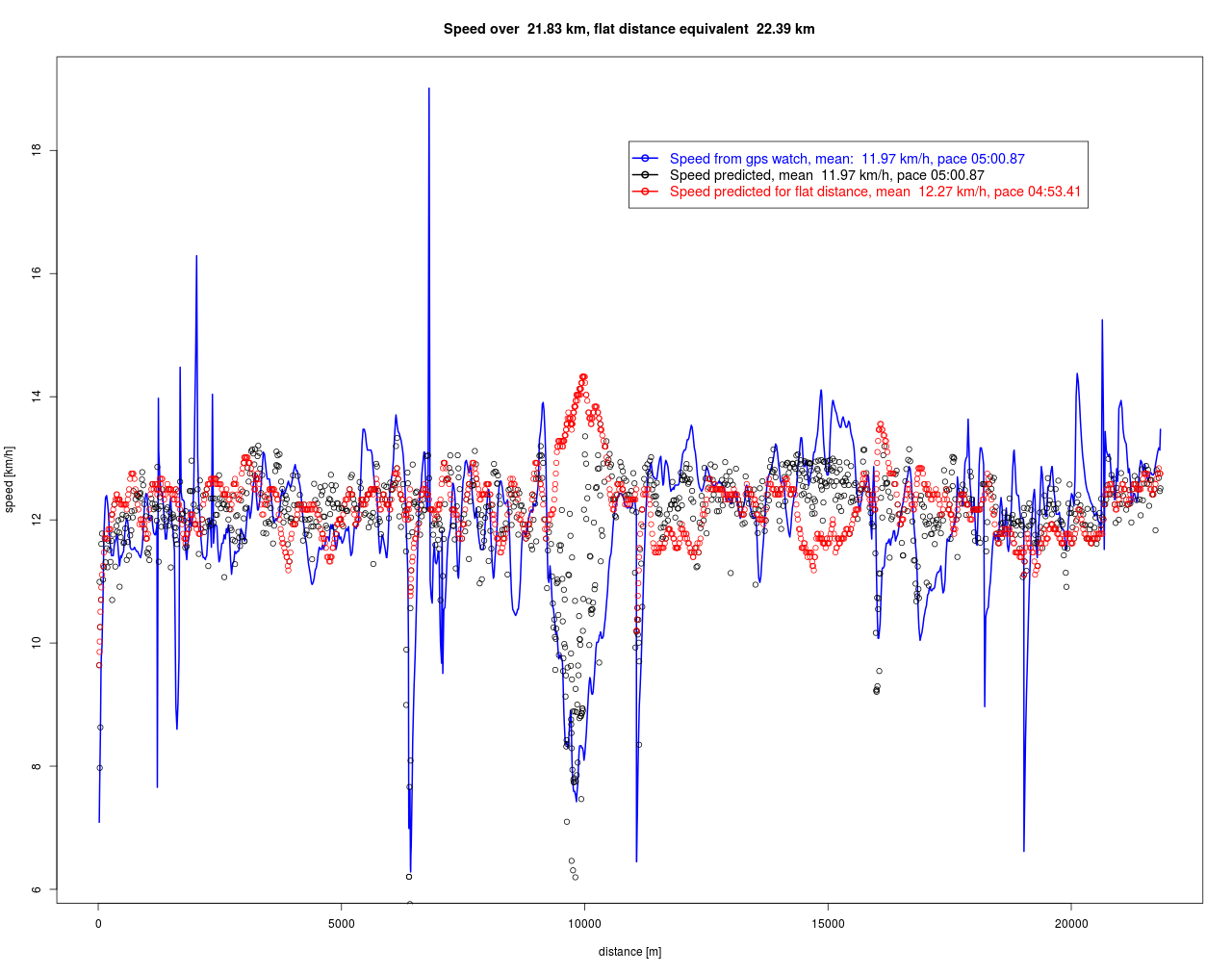

![\[ \begin{array}{lcl} % P(t)_{\mbox{\small Hubleistung}} & = & m_{\mbox{\small Läufer}} g H(t) \,\, K(t) \\ P(t)_{\mbox{\small Beinbeschleunigung}} & = & c K(t) \\ P(t)_{\mbox{\small Luftwiderstand}} & = & \frac{1}{2} r_{\mbox{\small Luft}} A_{\mbox{\small Läufer}} c_{w \,\mbox{\small Läufer}} v(t)_{\mbox{\small Läufer}}^3\\ P(t)_{\mbox{\small netto}} & = & P(t)_{\mbox{\small Hubleistung}} + P(t)_{\mbox{\small Beinbeschleunigung}} + P(t)_{\mbox{\small Luftwiderstand}}\\ P(t)_{\mbox{\small brutto}} & = & \frac{1}{\eta} P(t)_{\mbox{\small netto}} + P(t)_{\mbox{\small Grundumsatz}}\\ W_{\mbox{\small Lauf}} & = & \sum_i t_i P(t_i)_{\mbox{\small brutto}} \\ \hline \multicolumn{3}{l}{ \mbox{\small mit: } t= \mbox{\small Zeit}, H(t)=\mbox{\small vertikal Hub}, K(t)=\mbox{\small Kadenz}, v(t) =\mbox{\small Geschwindigkeit}, W_{\ldots} = \mbox{\small Arbeit}, P_{\ldots} = \mbox{\small Leistung}}\\ \multicolumn{3}{l}{ \mbox{\small und Parametern: } m=70,\quad g =9.81,\quad c=10,\quad r A c_w/2= 0.2889378414\quad \eta=0.21 } \end{array} % \]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-6eb72236cc600153f0b307615fc3f783_l3.png "Rendered by QuickLaTeX.com")


 so ergibt sich, da
so ergibt sich, da  . Bei konstanter Hubleistung, Hub und Schrittweite führt eine um 1% gesteigerte Masse zu einer Geschwindigkeitssenkung von ebenfalls 1%. Leichte Läufer sind hier also im Vorteil, und so etwas ähnliches besingen auch „Silbermond“ mit
. Bei konstanter Hubleistung, Hub und Schrittweite führt eine um 1% gesteigerte Masse zu einer Geschwindigkeitssenkung von ebenfalls 1%. Leichte Läufer sind hier also im Vorteil, und so etwas ähnliches besingen auch „Silbermond“ mit
![\[ P_{\mbox{\small Hubleistung}}= m\, g\, v\, tan(\phi) \]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-334a5d8b46e5f51b1a493cdec1bed4bd_l3.png "Rendered by QuickLaTeX.com")
 ab. Diese Funktionsform findet man auch in der Literatur
ab. Diese Funktionsform findet man auch in der Literatur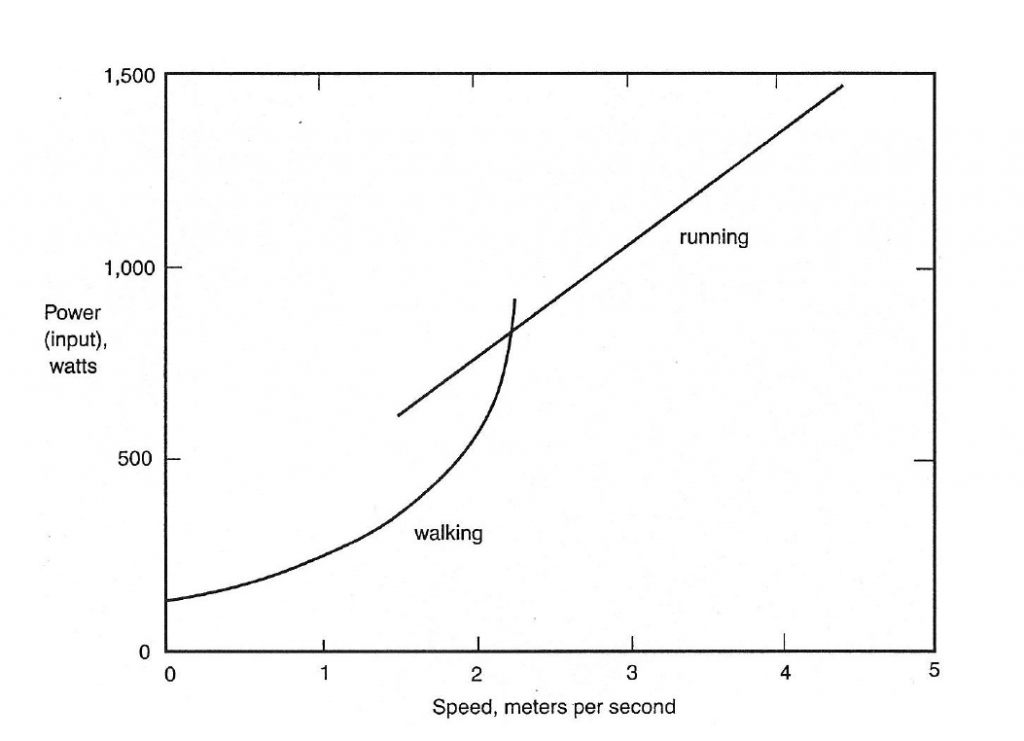
 ) sind diese Werte besonders unangenehm. Deutlich erkennbar sind einige schnellere Runden am Anfang sowie gemütliches Laufen in der zweiten Hälfte. Die dicken blauen Linien sind das 5%, 50%, 95% Quantil der gemessenen Geschwindigkeiten. Mit roten Punkten sind die abgeleiteten Nettoleistungen dargestellt und es lässt sich schon hier ein enger Zusammenhang vermuten.
) sind diese Werte besonders unangenehm. Deutlich erkennbar sind einige schnellere Runden am Anfang sowie gemütliches Laufen in der zweiten Hälfte. Die dicken blauen Linien sind das 5%, 50%, 95% Quantil der gemessenen Geschwindigkeiten. Mit roten Punkten sind die abgeleiteten Nettoleistungen dargestellt und es lässt sich schon hier ein enger Zusammenhang vermuten.![\[ W_{\mbox{\small Bein}} = \frac{1}{2} m_{\mbox{\small Bein}} v_{\mbox{\small Bein}}^2 \]](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-dd8ce58c0a6d3aafad6332ff3a9cfd5b_l3.png "Rendered by QuickLaTeX.com")

![\begin{tabular}{lrrrr} Masse & 70 & 70 & 70 & 70 \\ Beinmasse & 8,75 & 8,75 & 8,75 & 8,75 \\ \hline Pace [min/km] & 3:20 & 4:10 & 5:00 & 6:00\\ Speed [km/h] & 18 & 14,4 & 12 & 10 \\ v [m/s] & 5,00 & 4 & 3,33 & 2,78\\ \hline WB [J] & 109,38 & 70 & 48,61 & 33,76\\ Kadenz [1/min] & 150 & 150 & 150 & 150\\ Zeit pro Schritt [s] & 0,4 & 0,4 & 0,4 & 0,4\\ \hline P(B) [W] & 273,44 & 175,00 & 121,53 & 84,39 \end{tabular}](http://lt-pappelallee.de/wp-content/ql-cache/quicklatex.com-3621c08ef506bd6fccec8f6d312c1665_l3.png "Rendered by QuickLaTeX.com")
 verstärkt werden. Deshalb wird dieser Ansatz zunächst nicht weiter verfolgt.
verstärkt werden. Deshalb wird dieser Ansatz zunächst nicht weiter verfolgt.